Integração contínua em projetos usando monorepo
Iniciar qualquer projeto de software envolve a tomada de uma série de decisões. Dentre as decisões corretas que tomamos no projeto da Code:Nation eu posso citar a escolha da linguagem Go em conjunto com a Clean Architecture, a recente adoção dos conceitos de JAMstack e a escolha por organizarmos o código na forma de um único repositório no Github. Neste post quero falar especialmente sobre este último ponto, o monorepo e como resolvemos um dos desafios desta decisão.
Com o aumento da complexidade dos projetos, com microserviços e diferentes interfaces consumindo recursos, surgiu a discussão entre separar o código em diversos repositórios ou unificar tudo em um único. Talvez os maiores exemplos de empresas que adotaram o monorepo são o Google e a DigitalOcean, conforme podemos ver nos posts:
- Why Google Stores Billions of Lines of Code in a Single Repository
- Cthulhu: Organizing Go Code in a Scalable Repo
Na minha opinião as maiores vantagens desta abordagem é simplificar o gerenciamento do repositório e facilitar o reaproveitamento de código, algo que fica ainda mais fácil graças a Clean Architecture.
Mas um dos desafios do monorepo é o processo de build e deploy automatizados. Com todo o projeto na mesma estrutura é preciso cuidado ao definir as estratégias de CI/CD para evitar que o tempo de build/deploy não torne-se uma pedra no caminho da equipe. No post da DigitalOcean que citei acima eles comentam que resolveram este problema criando uma ferramenta interna chamada gta(Go Test Auto), que infelizmente não tornaram open source. Para resolver este problema usei uma abordagem similar a citada pela DigitalOcean, mas usando shell script.
Atualmente esta é a estrutura de diretórios do nosso repositório:
api = API and documentation
chatbots - telegram, facebook and slack chatbots
cli = codenation cli, used by developers to run the challenges
cmd = utils and fixtures
core = Go core packages, used by all the project
docs = source code of internal docs (hosted at Github Pages)
frontend = Vue.js project and templates used by Sam
infra = configuration files used by staging and production servers
lambda = lambda functions
research = Python notebooks and other research assets
sam = cli tool used by us to generate pages, include challenges and other admin tasks
scripts = shell scrips used by CI/CD and other admin tasks
web = ReactJS project (Signin, Signup, Forgot password) - IN PROCESS OF DEPRECATION
workers = workers that consume SQS queues
.drone.yml = CI/CD configuration file
.goreleaser.yml = Goreleaser configuration file. Used to deploy the codenation-cli to Github, Homebrew
docker-compose.yml = Docker configuration used by local and staging environments
Gopkg.* = Go dependencies configuration files
Makefile = build and admin tasks
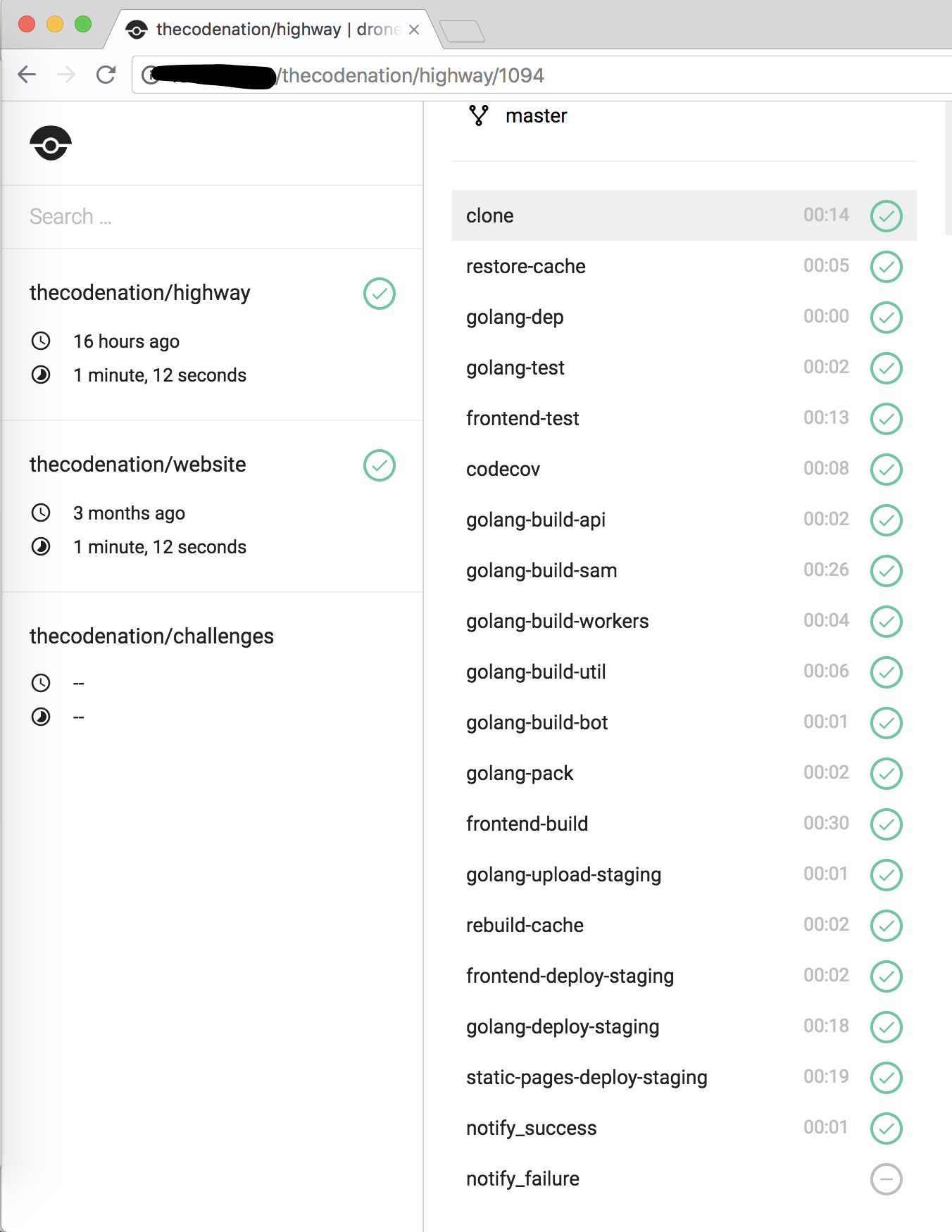
Nós usamos o Drone para gerenciar nosso processo de build/deploy. Venho usando ele desde 2017 e ele tem se mostrado outra decisão correta. Nosso pipeline de build pode ser visto na imagem:
E um trecho do nosso arquivo de configuração do Drone pode ser visto abaixo:
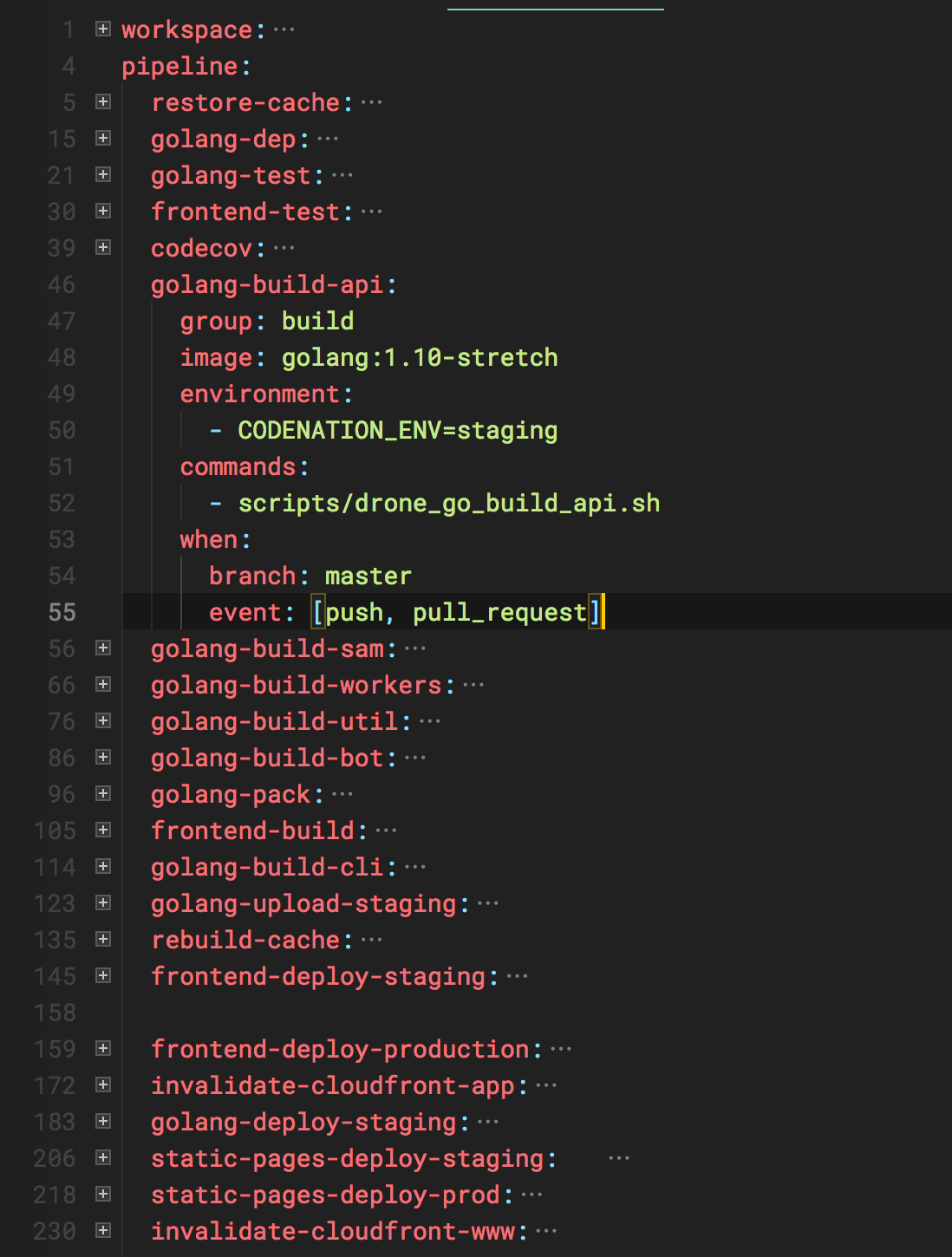
Como é possível ver no arquivo de configuração, o passo golang-build-api executa o script drone_go_build_api.sh. Neste script temos o seguinte código:
#!/bin/bash -e
watch="api core"
. scripts/shouldIBuild.sh
shouldIBuild
if [[ $SHOULD_BUILD = 0 ]]; then
exit 0
fi
make linux-binaries-api
BUILD_EXIT_STATUS=$?
exit $BUILD_EXIT_STATUS
A variável watch contém a lista de diretórios que devem ser monitoradas para definir se este passo deve ou não ser executado. Esta decisão é tomada no script shouldIBuild.sh:
#!/bin/bash -e
SHOULD_BUILD=0
shouldIBuild() {
if [[ "${DRONE_DEPLOY_TO}" ]]; then
SHOULD_BUILD=1
else
. scripts/detectChangedFolders.sh
detect_changed_folders
toW=($(echo "$watch" | tr ' ' '\n'))
changed=($(echo "$changed_components"))
for i in "${toW[@]}"
do
for j in "${changed[@]}"
do
if [[ $i = $j ]]; then
SHOULD_BUILD=1
fi
done
done
fi
}
O primeiro teste realizado verifica se está sendo executado um deploy, identificado pela variável de ambiente DRONE_DEPLOY_TO. Caso positivo a variável SHOULD_BUILD é definida como verdadeira (1) e o passo deve ser executado. Caso não seja um deploy o script detectChangedFolders.sh é usado para verificar se um dos diretórios definidos em watch está sendo alterado neste build. Caso seja positivo o passo vai ser executado. O código do detectChangedFolders.sh é:
#!/bin/bash -e
export IGNORE_FILES=$(ls -p | grep -v /)
detect_changed_folders() {
if [[ "${DRONE_PULL_REQUEST}" ]]; then
folders=$(git --no-pager diff --name-only FETCH_HEAD FETCH_HEAD~1 | sort -u | awk 'BEGIN {FS="/"} {print $1}' | uniq);
else
folders=$(git --no-pager diff --name-only HEAD~1 | sort -u | awk 'BEGIN {FS="/"} {print $1}' | uniq);
fi
export changed_components=$folders
}
A mesma configuração é feita em todos os scripts usados pelo Drone. Assim, uma alteração no diretório frontend, por exemplo, não vai gerar o build da api ou dos workers de filas.
Com esta mudança conseguimos diminuir nosso tempo de build de mais de 5 minutos para alguns segundos, dependendo do que estiver sendo alterado no commit realizado pelo desenvolvedor.
Acredito que seja fácil alterar os scripts e adaptar a solução para outras ferramentas de integração contínua. Espero que esta dica ajude quem estiver tendo problemas similares.